
走路靠滚、水陆两栖、察打一体,警用球形机器人火了!

这两天,一台圆滚滚的警用球形机器人街上巡逻的视频火了!这个奇特的造型,让我瞬间想到科幻电影中的那些球形机器人,据报道,中国这款球形机器人能跟踪、格斗、抓捕、水陆两栖、查打一体

▲机器狗:哥们,听说你想抢占我的工作?
这个警用球形物体,不止把我惊呆了,很多国外媒体看到后也备受震惊。这么一个球,怎么能做到格斗抓捕、查打一体?

展开全文
▲苏联曾经想象过球形坦克

▲据说这款机器人是浙江大学参与研发的。

球形机器人的原理
类似的球形机器人在很多科幻电影中都有出现,比如《遗落战境》中有一种自动巡航的查打一体球形机器人,《超级战舰》中外星人有一种可以四处撞毁飞机坦克的球/轮式武器。
而如今,球形机器人算是走进了现实。
球形机器人是一种以球形为基本形态的机器人系统,它通常由球壳+球体组成,外壳可以封装例如电机、传感器、控制器和电源等各种内部组件,内部主要采取质心旋转机构。

运动方式简单来说就是以改变机器人重心的方式并激活内部驱动电机,这不仅赋予了球形机器人高度的灵活性,还使其能够在复杂地形和狭窄空间中自如穿梭。
例如,美国MIT提出的“智能仓鼠球”理念,就是通过改变质心位置使机器人能够沿指定方向滚动。

▲智能仓鼠球试验模型
球形机器人要想保持平衡其实并不容易,对于人来说,保持身体平衡或许是个极其简单的事,比如说,当你站在公交车上,车突然启动或刹车时,你或许会打个趔趄,但你肯定马上就能恢复平衡。

人之所以能迅速恢复平衡,是因为人的耳朵里有一个前庭系统,它能够感知身体的倾斜和加速度,并迅速调动肌肉调整姿态,可这种能力对于机器来说就很难了。
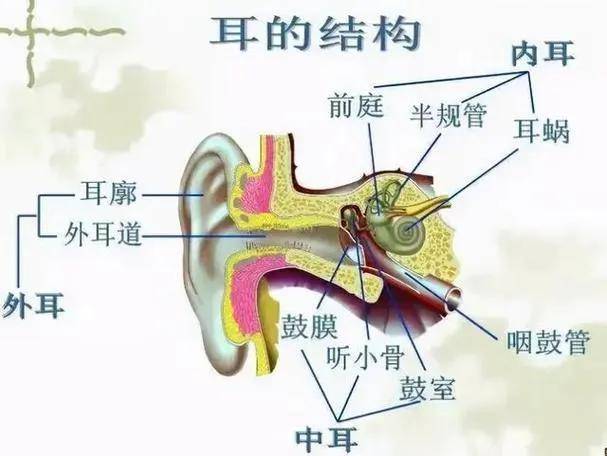
而球形机器人保持稳定的诀窍就在于它的“前庭系统”——陀螺仪传感器,熟悉武器装备的网友都知道,陀螺仪最早被用于航空航天领域,主要是用来帮助飞机、导弹等航空器感知姿态。
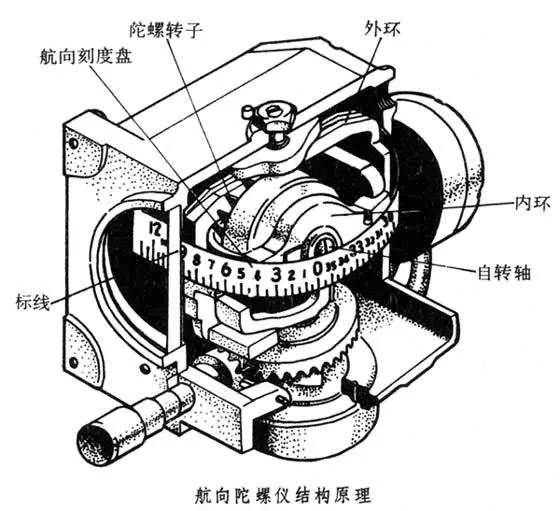
陀螺仪的工作原理可以用一个经典实验来说明,当你拿一个快速旋转的陀螺,它的转轴方向会保持稳定,哪怕你轻轻推它,它也不会轻易改变方向。
也就是说,一个高速旋转的物体(比如陀螺)会倾向于保持其旋转轴的方向不变,这种特性被科学家用来设计能够感知物体姿态变化的陀螺仪。
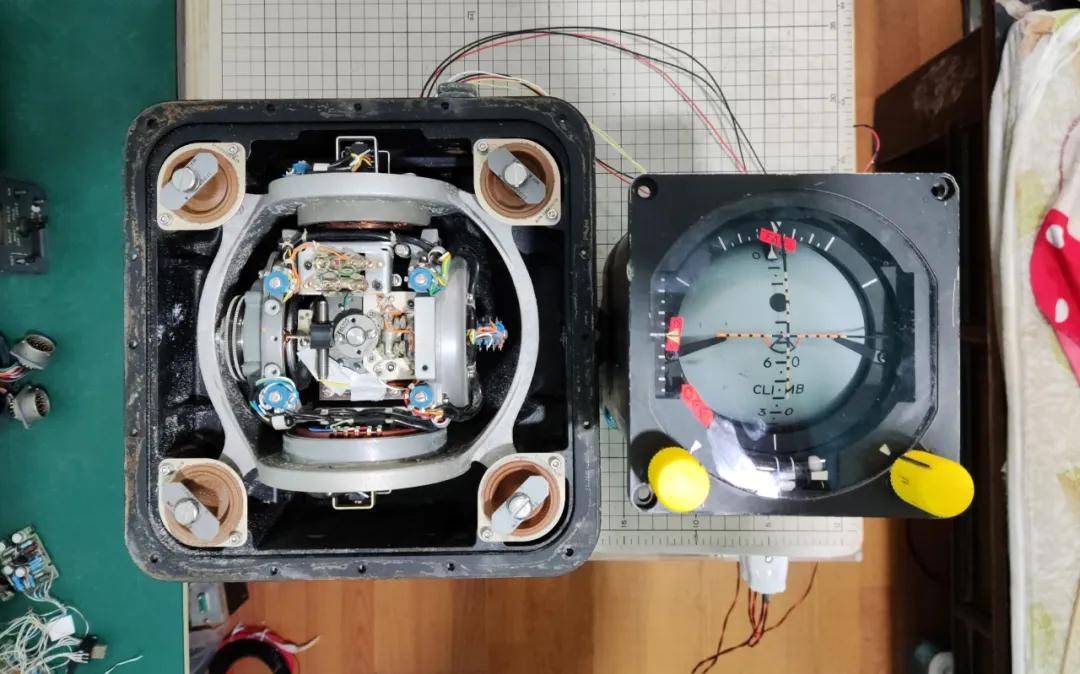
▲波音737上的霍尼韦尔vg-311垂直陀螺仪
在球形机器人内部,就安装着陀螺仪,它会不断监视机器人的姿态信息,当机器人受到外力或行驶到倾斜地面时,陀螺仪会感知到角度的变化,并迅速将这些数据传递给机器人内部的控制系统。
比如说,当高速旋转的陀螺前倾时,控制系统就会知道机器人可能正在下坡,需要减速向后调整;当陀螺后仰时,控制系统就会知道机器人可能正在上坡,需要立即加速向前调整。
早期的机械式陀螺仪比较大,随着电子技术的进步,目前微机电系统陀螺仪已取代了传统机械陀螺仪,广泛应用在咱们的手机、小型无人机等上。
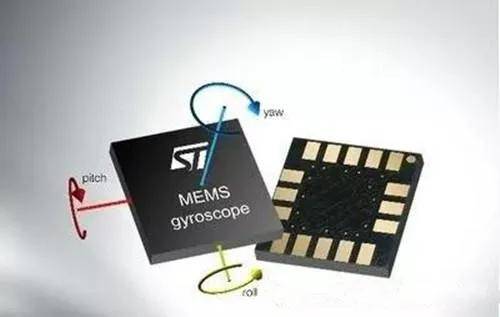
这种小型化的传感器可以检测到物体的倾斜角度、旋转速度,甚至是细微的抖动,精度可达0.01度,像在这款球形机器人的实验中,配备的陀螺仪就能够以每秒1000次的频率刷新姿态数据。

有了这种超高速的感知能力,机器人不但能快速感知任何微小的失衡,即使受到意外撞击时,它也能在0.1秒内重新调整重心。

不过,感知倾斜只是第一步,要真正“稳住”,球形机器人还需要强大的动态平衡控制系统,也就是它的“大脑中枢”,它主要负责分析陀螺仪传回的数据,并计算出如何快速调整姿态。
要说起动态平衡,那就必须先得把“倒立摆”理论讲清楚,举个例子来说吧,一个长杆立在滚动的小车上,当小车移动时,杆子会倾斜。为了保持杆子不倒,小车需要不断调整自己的位置,保持重心稳定。
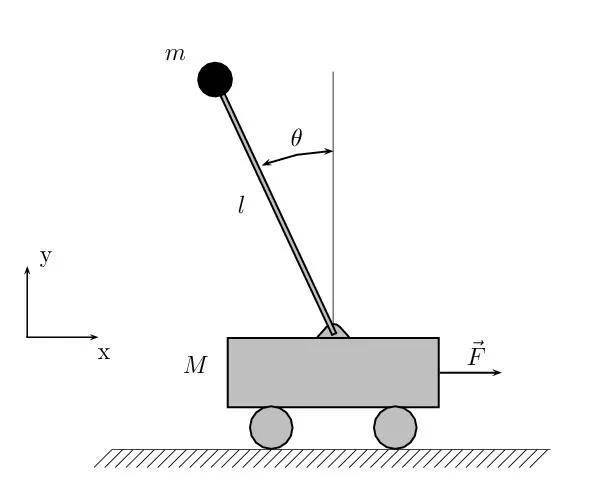
球形机器人内部的动态平衡系统,就是用算法模拟了这种行为,它主要是通过快速调整滚动方向和加速度来让自己保持平衡。
举个简单例子:当机器人向前倾斜时,控制系统会指挥后部的驱动模块加速滚动,把重心往后拉;如果向左侧倾斜,系统会让右侧的模块发力,重新平衡。
通常,动态平衡系统的工作大体可以分为三个步骤,首先是陀螺仪提供实时的倾斜和加速度数据,然后控制系统使用PID控制之类的复杂数学算法,计算出需要调整的方向和力度,最后驱动装置根据指令快速补偿运动,把机器人拉回重心。
由于动态平衡系统的反应速度极快,从感知到执行只需几毫秒,因此即使机器人受到突然冲击,也能稳如泰山。
光是站稳还不够,球形机器人最大的亮点在于它可以自由滚动,随时改变方向,甚至原地转圈,这就要归功于它独特的球轮驱动系统了。

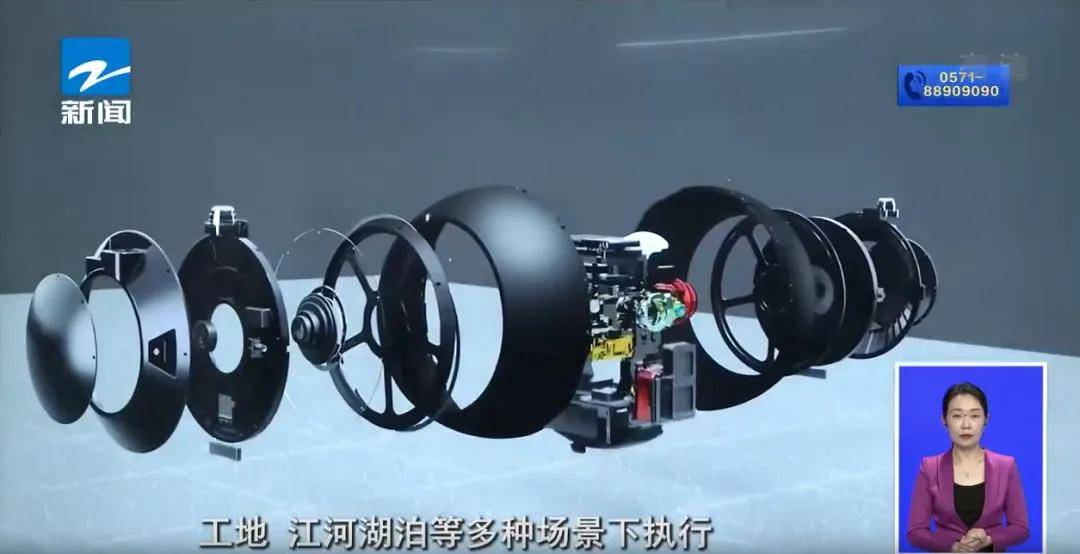
球形机器人的外壳是一个高强度的球体,内部则是一套复杂的驱动模块,这套模块通常由多个电动滚轮组成,每个滚轮都能独立控制方向和速度。
这套装置的灵感应该来源于两样东西,一种是咱们早些年用的球鼠标,其中的小球能够感应手的推动方向,实现光标移动;另一种就是空气曲棍球桌,主要通过控制摩擦力让球滑动,模拟自由运动。

球形机器人内部通常包含3-4个独立电机,这些电机连接到特定的驱动滚轮上,通过调整滚轮的转速和转向,机器人就可以灵活精准地走位了。
比如说,所有滚轮同步加速或减速,就会让机器人前进或后退;左右滚轮差速运动,机器人就可以转弯;相对方向的滚轮同时反向旋转时,机器人就能原地旋转。
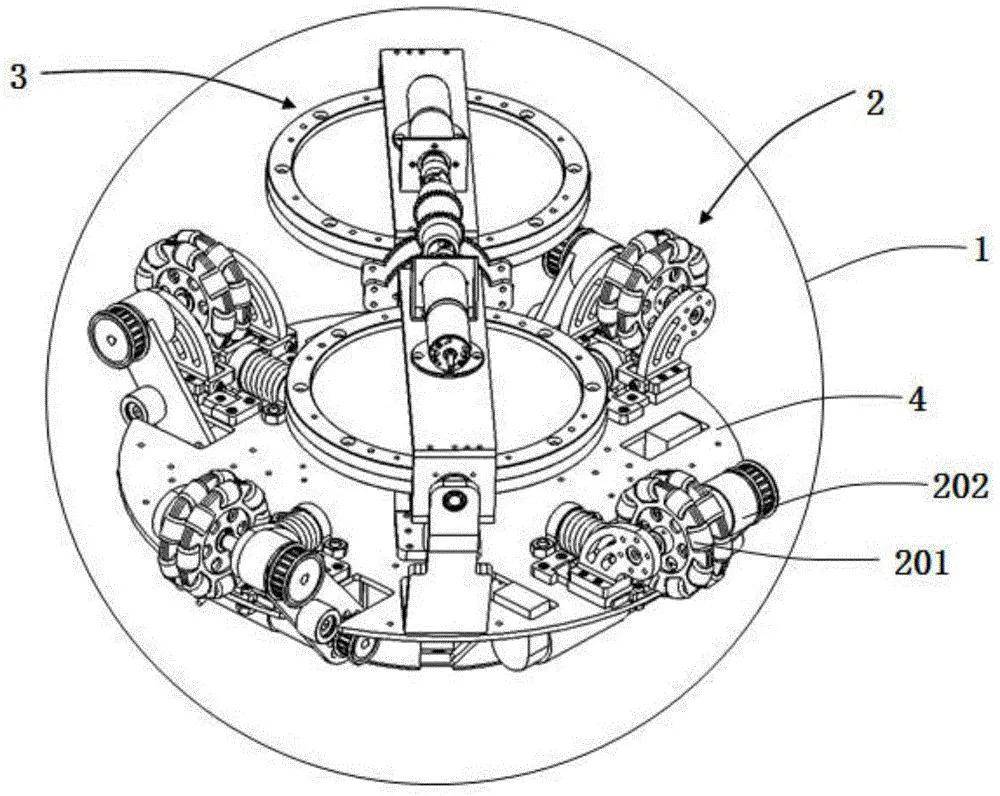
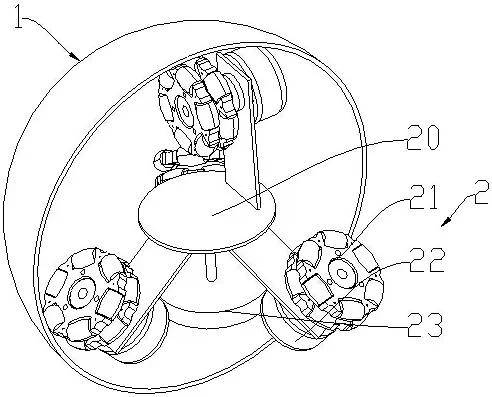
▲某型球形机器人内部构型
所以说,正是球形机器人的“耳朵”(陀螺仪)、“大脑”(动态平衡控制系统)和“脚”(球轮驱动系统)完美协作,共同赋予了它“不倒金身”和“灵活身手”。

关于球形机器人的研究最早可以追溯到一篇1995年IEEE ICRA上的文章,当时文章介绍了一种带有内部全向轮的球形机器人的概念,讨论了球形机器人的运动学、动力学和控制策略。
▲带有内部全向轮的球形机器人
不过,由于技术相对复杂,球形机器人的研究和实际产业化进程一直落后于其它类别的机器人。
直到2011年,MIT提出了“仓鼠球”概念,即像仓鼠那样,通过在机械上使用一种两轴万向节,实现了任意改变机器人的质心位置,又采用了类似无人机云台的稳定机构,从而实现球形机器人能朝着一个方向稳定滚动,这项研究也被认为是球形机器人实际应用的起点。

据悉,我国这个上街巡逻的球形机器人是鹿城公安和浙江大学控制科学与工程学院共同研发的,型号是RG-T,其工作原理应该跟“仓鼠球”类似。

很多外国朋友说这个球形警用机器人是照着科幻电影来的,他们说的电影就是2012年美国上映的《超级战舰》,电影里球形机器人是外星战舰的撒手锏,威力恐怖。








评论